This article shows how to load ArduCopter firmware into APM control board. This post refers to the previous “APM 450 Quadcopter Build” post.
Mission Planner
First we need do download a free software called Mission Planner. This tool gives us the possibility, other than flashing APM board with different firmwares (ArduRover, ArduCopter, Arduplane), to control flight data, calibrate compass, accelerometer and radio control, program switches for different flight modes and even plan flight for performing autonomous missions.
It can be downloaded from here. To install in a Windows machine just double click on the “.msi” and follow the setup:
Keep in mind that the package installs also all the necessary drivers needed by the board to be recognized by the Operating System:
If everything is installed properly the following message is displayed:
Once the software has been installed we can connect the board to the PC through the Micro USB cable (be careful to have the APM disconnected from every other power source like the PM); then, clicking on Computer -> Properties -> Device Manager, under “Ports (COM & LPT)” you should have something like this:
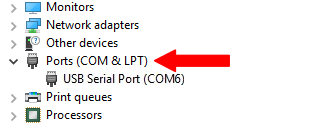
where COM6 is the communication port used for exchanging data with the APM.
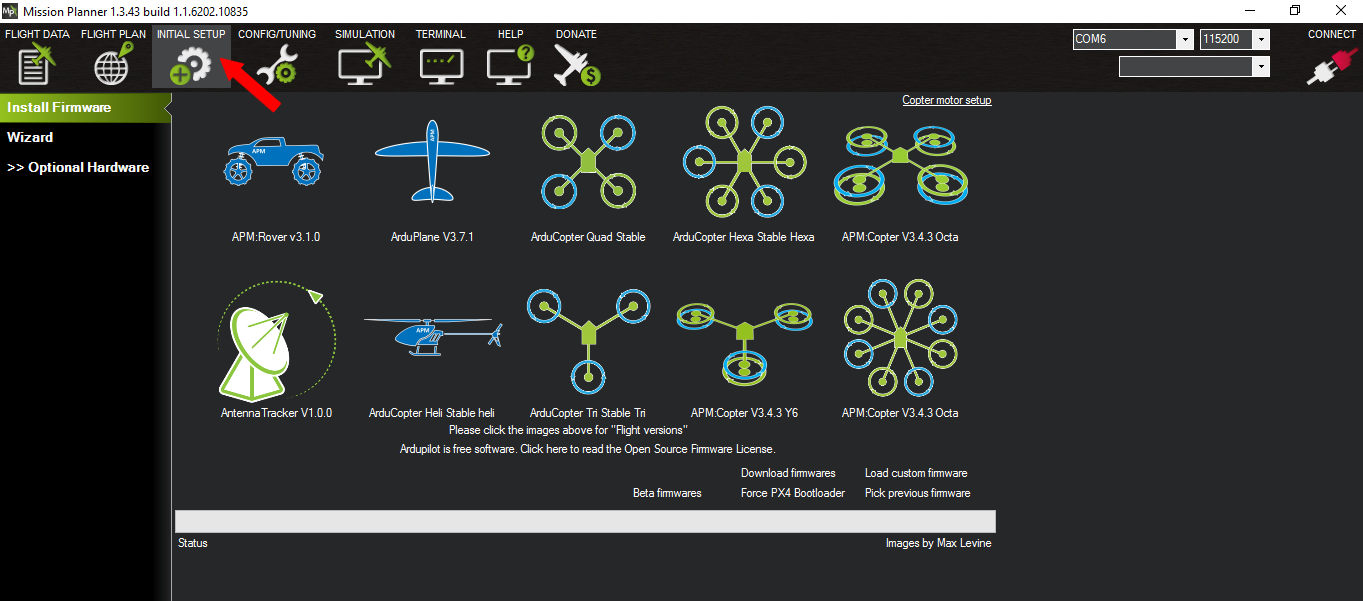
After launching Mission Planner software, this port will be the same appearing in the upper right corner of Mission Planner screen:

Do not click on “Connect”, since first we have to upload the firmware on the APM; to do so, we have to click on Initial Setup -> Install Firmware:
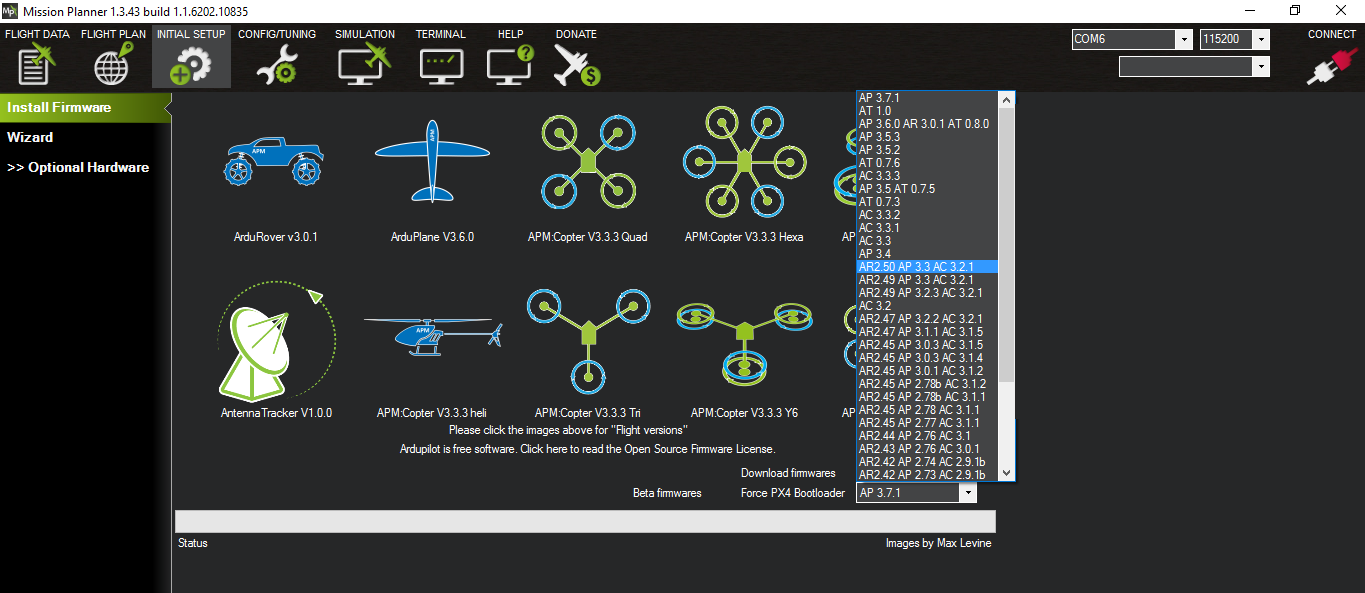
Since ArduCopter 3.2.1 is the last supported version for APM 2.x control board (in my case 2.6) we need to click on “Pick previous firmware” on the bottom right and choose the corresponding option as in the image below:
After that, we just select the Quad version “ArduCopter V3.2.1 Quad” and confirm the upload activity:
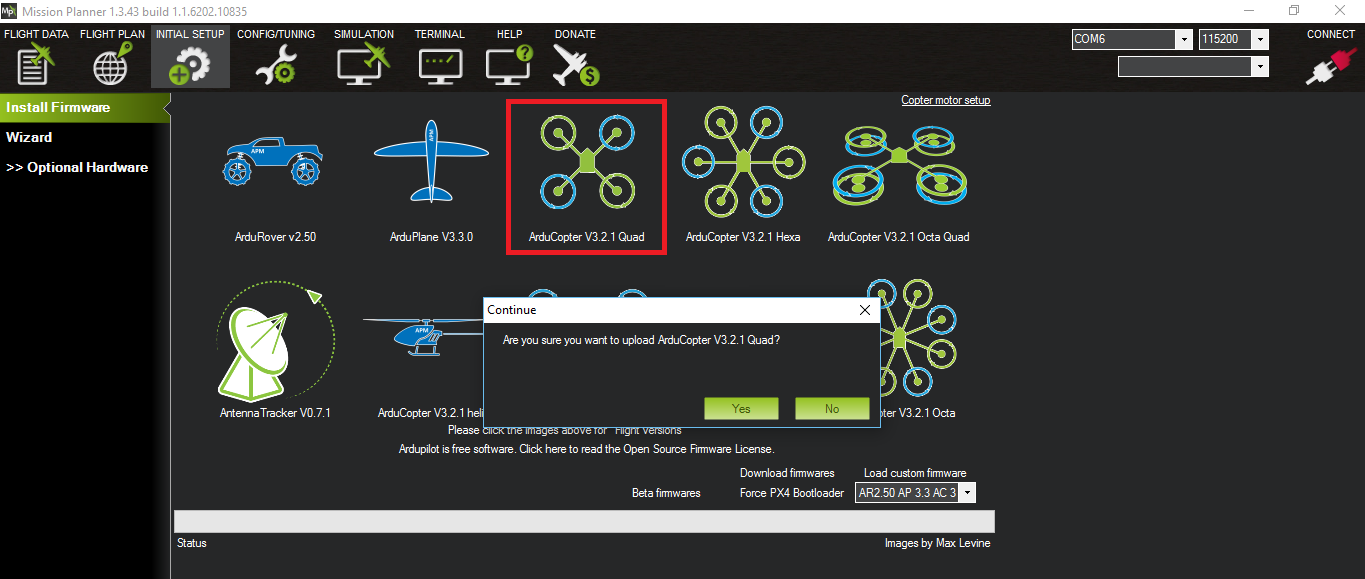
Beware that Mission Planner takes about 5-6 minutes to upload the firmware to the APM control board.
To calibrate magnetometer (compass), accelerometer and radio control just follow these good articles from ArduPilot website: Compass calibration, Accelerometer calibration, Radio control calibration.