In this article we will see how to solve the yaw wobbling on the Eachine Wizard X220S, which is visible and relevant especially during hovering. By doing this we will see how to analyze flight logs using Betaflight Blackbox Explorer.
Noise on gyro readings
Understanding the cause of the yaw wobbling is the first thing to do. Let us focus the attention on the flight controller which basically takes some inputs and generates some outputs: now, if the inputs are noise free everything works good. But, what if there is noise, for example, in gyro readings? That noise affects how the controller reacts and this can generate unexpected behavior during flight.
Motors vibration can be transferred to the frame even if they are soft mounted as in the case of the Eachine Wizard X220S. Now, since the Flight Controller is attached to the frame itself through some screws, vibrations are transferred to the FC: this means gyro readings are noisy and that causes the wobbling.
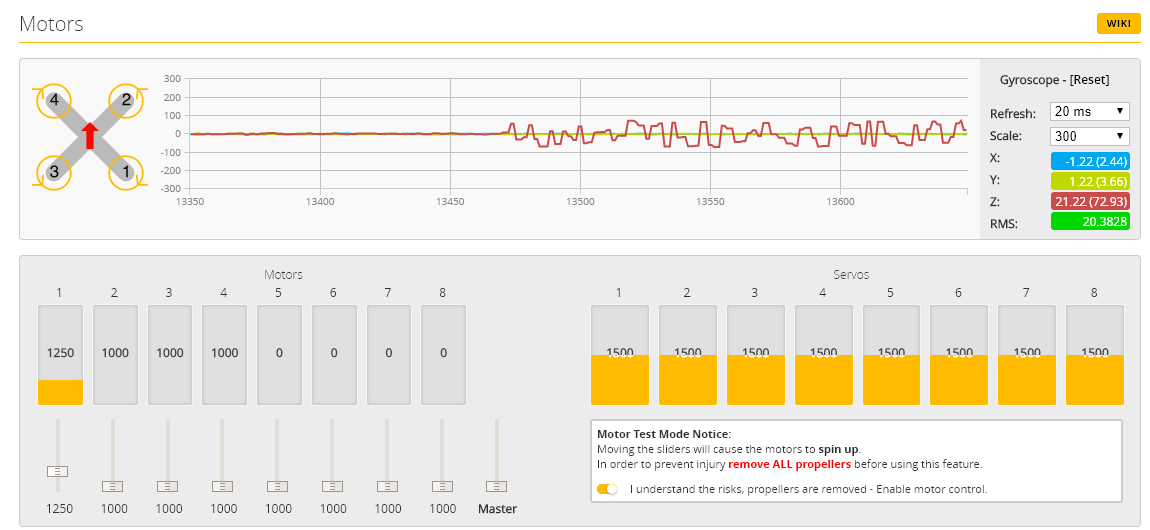
As the image shows, the noise increases as motors rotation speed reaches a certain value which coincides with the one needed for the hovering: in the graph it is reported how motor 1 rotation affects gyro readings even if the quadcopter is standing still on the bench without propellers on (of course, the amount of vibration depends also from the quality of the motors and in particular from their bearings).
As reported, this vibration affects gyro readings, particularly on the z axis.
Betaflight Blackbox Explorer Analysis
This behavior can be seen in the Betaflight Blackbox Explorer: this application allows to visualize, in a graphical way, data collected during the flight and saved on a microSD card (we have seen how to enable this feature in this previous article).
The installation of the application is just as simple as the one of Betaflight Configurator since it can be downloaded as an extension of Google Chrome browser. Once it is installed, it is just a matter of launching the app, clicking on “Open log file/video” and select the log file saved on the microSD which has the extension .BFL.
This app is very useful to analyze how the quadcopter performed during the flight. In this case we will use it to just check gyro readings. In particular, we are interested in the gyro[yaw] parameter (yellow line in the graph):
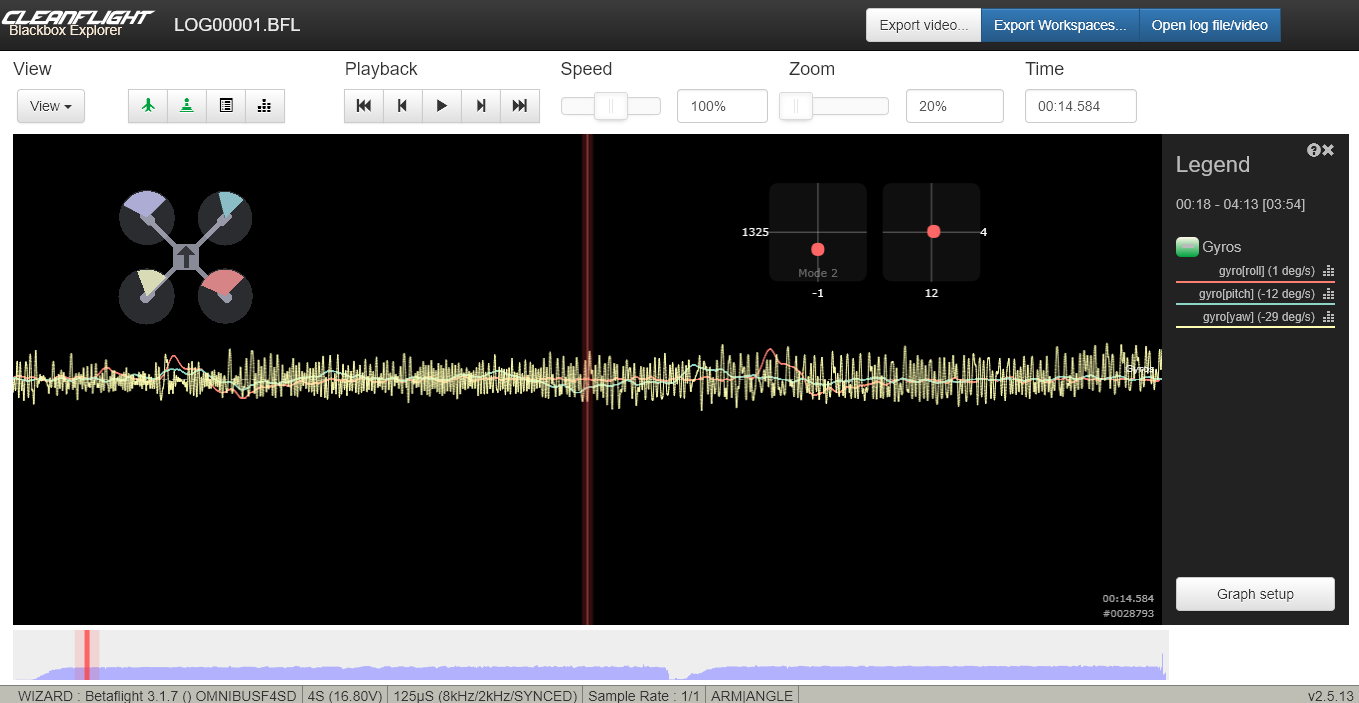
Clearly, there is a lot of noise affecting the gyro on the yaw. Noise cannot be completely removed, but can be drastically mitigated.
Anti-vibration Standoffs
This annoying behavior can be fixed with a simple solution, i.e. mounting the Flight Controller on Anti-vibration Standoffs:

In the substitution process of the old standoffs, having these tools comes in handy:
- Drillpro 4pcs Hex Screwdriver Tool Kit 1.5/2.0/2.5/3.0mm
- DANIU 4pcs Metal 4.0/5.5/7.0/8.0mm Hex Screwdriver Set
- DANIU 25 in 1 Multi-purpose Precision Screwdriver Set
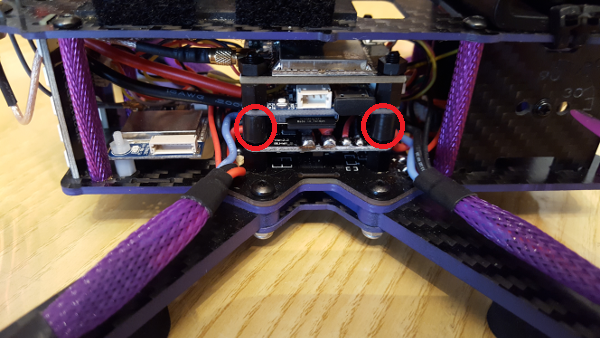
The following image shows the result with the FC attached to the bottom stack using anti-vibration standoffs screws which, thanks to the damping material, absorb most of the vibrations caused by the motors and transferred to the quadcopter frame.
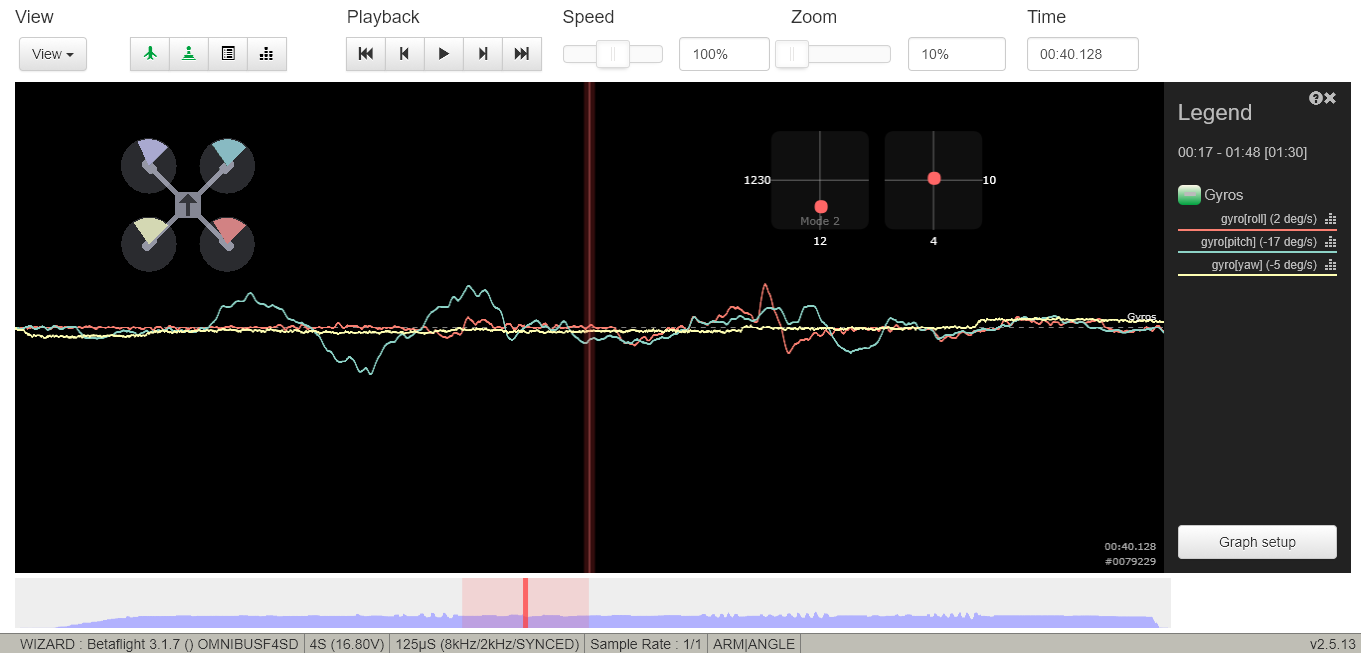
After placing anti-vibration standoffs under the Flight Controller, the noise on yaw gyro readings is almost completely gone and consequently the wobbling is no more there.
Conclusions
In this article we have seen how it is possible to analyze flight logs using Betaflight Blackbox Explorer and how a simple and cheap modification can solve a bad issue conditioning quadcopter behavior in flight.
For the overview of the Eachine X220S, read this article.
If you want to upgrade Betaflight firmware for the Omnibus F4SD on the Eachine Wizard X220S, read this article.
If you want to update Eachine Wizard X220S BLHeli 4in1 ESC firmware, read this post.
If you are experiencing video noise appearing as horizontal lines on the FPV camera view when motors are spinning, here is the resolution.